





Waves can be broadly defined as perturbations that travel in space and time. Waves occur in acoustics, optics, electromagnetism and several other fields. Waves also occur in fluids and therefore in the sea. In this latter case, they are called sea waves and can be originated by several different perturbations of the static equilibrium of water. In fact, they can be originated by ships, earthquakes, living organisms and several other causes of perturbation. Most of the sea waves are originated by wind, which induces a friction forcing over the sea surface. This latter categories of sea waves are called wind waves. Sea waves belong to the category of the “gravity waves”, as gravity is the force that tends to restore equilibrium.
Very often several different waves occur simultaneously in the sea, therefore originating a group of waves superimposed each other, which originate an articulated forcing over the structures that they encounter during their travel. It is compelling to take into account the effects of the superimposition of waves in the design process. The solution that is most frequently adopted is to model waves one by one and then to assume that their effect can be superimposed.
Given that waves travel in space and time, any of their geometric, kinematic, and dynamic behaviours generally depend on 4 independent variables, namely the coordinates along the three cartesian axes and time. To simplify our treatment, we refer to plane waves; namely, we assume that the crests of the wave are infinitely long with constant elevation in the transversal direction, and the wavefronts are infinite parallel plans. Plane waves are bi-dimensional waves, where the motion of fluid only occurs along the vertical and longitudinal direction, where the latter is given by the direction of propagation of waves. In other words, there is no movement of fluid across the wave itself.
Our target is to develop a mathematical model to describe the behaviour of waves, like for instance amplitude and period, depending on the given external forcing and the geometry of the sea bottom, which dictate the initial and boundary conditions. From fluidmechanics, we know that the motion of fluid is completely described by the velocity vector that generally varies in space and time, namely
v(x,z,t) = u(x,z,t)ix + w(x,z,t)iz (1),
where z is the vertical upward-positive coordinate, z=0 is the mean sea level, x is the longitudinal coordinate along the direction of propagation of the wave, ix and iw are unit vectors along the x and z axis, respectively, and finally u and w are the x and z components of the velocity vector, respectively.
By assuming that water is incompressible, the continuity equation applies as a result of conservation of mass. If we refer to an elementary control volume, we can write
 .
.
We now assume that the motion of the fluid (the flow) is irrotational, namely, that the cross gradient of the velocity or shear is zero. This assumption is more realistic for inviscid fluids. It follows that the velocity can be expressed in terms of the velocity potential Φ, namely

By substituting eq. (3) in the continuity equation one can write

therefore obtaining the Laplace equation, which is a second-order partial differential equation.
Laplace's equation is all what we need to describe the motion of waves at a high distance from the boundary. In fact, the motion in the proximity of the bottom and the surface is also influenced by the initial and boundary conditions. However, their effect vanishes with increasing distance from the the boundaries. It is important and useful to make some physical considerations on Laplace's equation. First, one should consider that an irrotational flow is necessarily conservative, provided the domain is simply connected, which is the case for the motion of sea waves. Conservative field implies that energy is conserved as one would expect.
Laplace's equation allows several different solutions, depending on the initial and boundary conditions. The uniform flow is itself a solution, as one would expect as it satisfies the continuity equation and is irrotational. Therefore, the next step to study the flow is the definition of the above conditions. The initial conditions imply the specification of the velocity vector in the control volume at the initial time t = 0. The boundary conditions imply the specification of the velocity vector at the boundary of the control volume, and in particular at the sea bottom and surface. In fact, we further assume that the boundary conditions at the far ends of the longitudinal dimension of the wave do not have a significant impact. This assumption holds when the wave travels for a long distance.
The sea bottom is assumed to be impermeable and therefore the velocity component along z must be null at all times. If the water depth is h, one obtains

where h is the average water depth and therefore z = -h is the vertical coordinate of the sea bottom.
The boundary condition at the water surface can be derived by imposing that the fluid particles that are located near the surface remain at the surface during the wave travel. This assumption holds if the motion is smooth, namely, if the wave does not break. If one denotes with z = η(x,t) the vertical coordinate of the sea surface, the above boundary condition, in mathematical terms, means that

which is called the "kinematic boundary condition". Derivation of eq. (6) is not demonstrated here for the sake of brevity. A detailed explanation can be found here. Furthermore, we need to impose that the relative pressure at the sea surface is null. If we refer to absolute pressure, rather than relative, we mean that the pressure at the sea surface is constant and equal to the atmospheric pressure. This boundary condition, which is called the "dynamic boundary condition", inasmuch it refers to an equilibrium of forces, can be expressed in mathematical terms by referring to Bernoulli's principle, which can be written in the form

where p is pressure over a given fluid particle, ρ is mass density for water, g is gravity acceleration and R(t) is given by psurf/ρ, where psurf is the pressure at the free surface, which is constant and equal to the relative atmospheric pressure, namely, psurf = 0. Therefore, by referring to z = η one obtains

In conclusion, the mathematical problem is defined by the following equations:
Resolving the above mathematical problem is complicated and several different solution may exist depending on the boundary conditions. A possible solution is given, for instance, by the uniform flow. A periodic flow is obtained by imposing the periodicity conditions, namely, Φ(x,t) = Φ(x+L, t) and Φ(x,t) = Φ(x, t+T), where L and T are wavelength and period, respectively.
It is interesting to mention that the the above mathematical model can be derived by following alternative proofs. For instance, it can be derived by imposing the dynamic equilibrium of a string that is vibrating in a two-dimensional plane, therefore obtaining the wave equation for plane waves, that can be written as

where c is the (constant) propagation speed of the wave. Initial and boundary conditions still need to be specified for the above equation, which is a partial differential equation on the displacement z, while eq. (4) refers to the velocity potential. However, under compatible initial and boundary conditions solutions of eq. (4) are also solutions of eq. (9), as one would expect.

Let us now consider the dynamic condition expressed by eq. (8). By considering that the second term at the left hand side can be neglected, one obtains

which nevertheless still involves difficulties as the potential, and the velocities, should be given at the free surface whose position is unknown. However, for small amplitude waves one can assume that the values at the sea level of velocity in equation (10) and the potential in equation (11) are replaced by the corresponding values at the mean sea level (see here), therefore obtaining:


Therefore the boundary conditions are now given at the sea bottom and mean sea level, therefore avoiding to give them at the free surface whose position is still unknown. The resulting equations set the basis for the "linear wave theory". Essentially, the linear formulation has been obtained by introducing approximations finalized to give the surface boundary condition at z = 0 instead of z = η. In fact, η is still unknown and therefore in the original formulation the boundary condition depends on the solution, therefore making the equation non-linear.
The linear formulation is particularly interesting because it allows application of the superposition principle, which states that the configuration induced by two waves can be obtained by summing the individual configuration originated by each wave taken alone. This would not be possible with the original non-linear formulation, as the configuration induced by each wave would depend on η and therefore on the combined effect of the two waves.
We are interested in solutions that correspond to a regular wave, namely, waves with constant amplitude, period, and direction. Therefore, we assume that the solution for the potential has the form
Φ(x,z,t)=A(z)sin(ωt-kx+φ0) (14)
where k is the wavenumber, ω is frequency and φ0 is the phase of the wave and A is an amplitude which depends on z. Dependence of amplitude on the vertical coordinate is a necessary condition given that the motion of fluid particles depends on their position along the vertical direction. For instance, in the proximity of the sea bottom the vertical component of the velocity is null and therefore the potential has a different gradient with respect to other locations. The solution given by (14) is called "traveling wave". The wavenumber is related to the wavelength λ by the relationship k = 2π/λ. By plugging this solution into eq. (4), (5), (12) and (13) we obtain
η(x,t)=a sin(ωt-kx) (15) ω2 = gk tanh(hk) (16)
where "tanh" indicate the hyperbolic tangent. Let us note that the amplitude a in eq. (15) is not taking the same value as the amplitude A(z) in eq. (14), even if they are related. Eq. (16) is called the "dispersion relation", which states that frequency and wavenumber are related each other. Eq. (14), (15) and (16) are the core of the linear wave theory.
The dispersion relation implies that waves with a given frequency must have a certain wavelength. Note that for a given k , there are two solutions for ω, namely, ω = (gk tanh(hk))1/2 and ω = −(gk tanh(hk))1/2. These solutions correspond to waves going to the right and to the left, respectively. If kh is small, then h is much smaller than λ, that is, the water depth is much smaller than the wavelength and we call this situation "shallow water". Conversely, if kh is large, we refer to "deep water". In shallow water we obtain ω = ±(gh)1/2k, while for deep water we obtain ω = ±(gk)1/2.
In order to distinguish between shallow and deep water, we can use the following rule:
- when h > λ/2 we refer to deep water;
- when h < λ/20 we refer to shallow water.
The phase velocity, cp, of a regular wave is defined as
cp = ω/k = L/T (17)
which is, for instance, the speed of the top (crest) of the wave as it moves along. From the dispersion relation we obtain the following expression for the phase velocity:
cp = g/ω tanh(kh) (18).
It is interesting to analyse the value of the phase velocity in deep and shallow water. For shallow water, one obtains
cp = ω/k = ((gh)0.5 k)/k = (gh)0.5 (19)
which means that the phase velocity is independent of both ω and k and only depends on h. These waves are called "non-dispersive". For deep water one obtains
cp = ω/k ≈ ω/(ω2/g) = g/ω = ((gk)0.5)/k = (g/k)0.5 (20)
Therefore, in deep water the speed increases with increasing wave period and wavelength.
The above analysis aims at providing explicit representations for the displacement η and the velocity potential of the wave. Actually, there are several other properties of waves that are relevant to civil engineering, like for instance velocity, acceleration and trajectories of fluid particles, as well as the pressure in fluid, which is given by the sum of atmospheric pressure, the hydrostatic pressure and a dynamic component given by movement of water. The above quantities can be inspected and quantified by referring to the linear theory.
The table below provides an overview of the main wave properties according to the linear wave theory (from Krogstad, H.E., Arntsen, Ø.A., Linear Wave Theory, see list of references). Note that the table uses the symbol d instead of h for water depth. Click on the table if you would like to zoom on it. A representation of a regular wave with explanation of symbols is given in Figure 1.

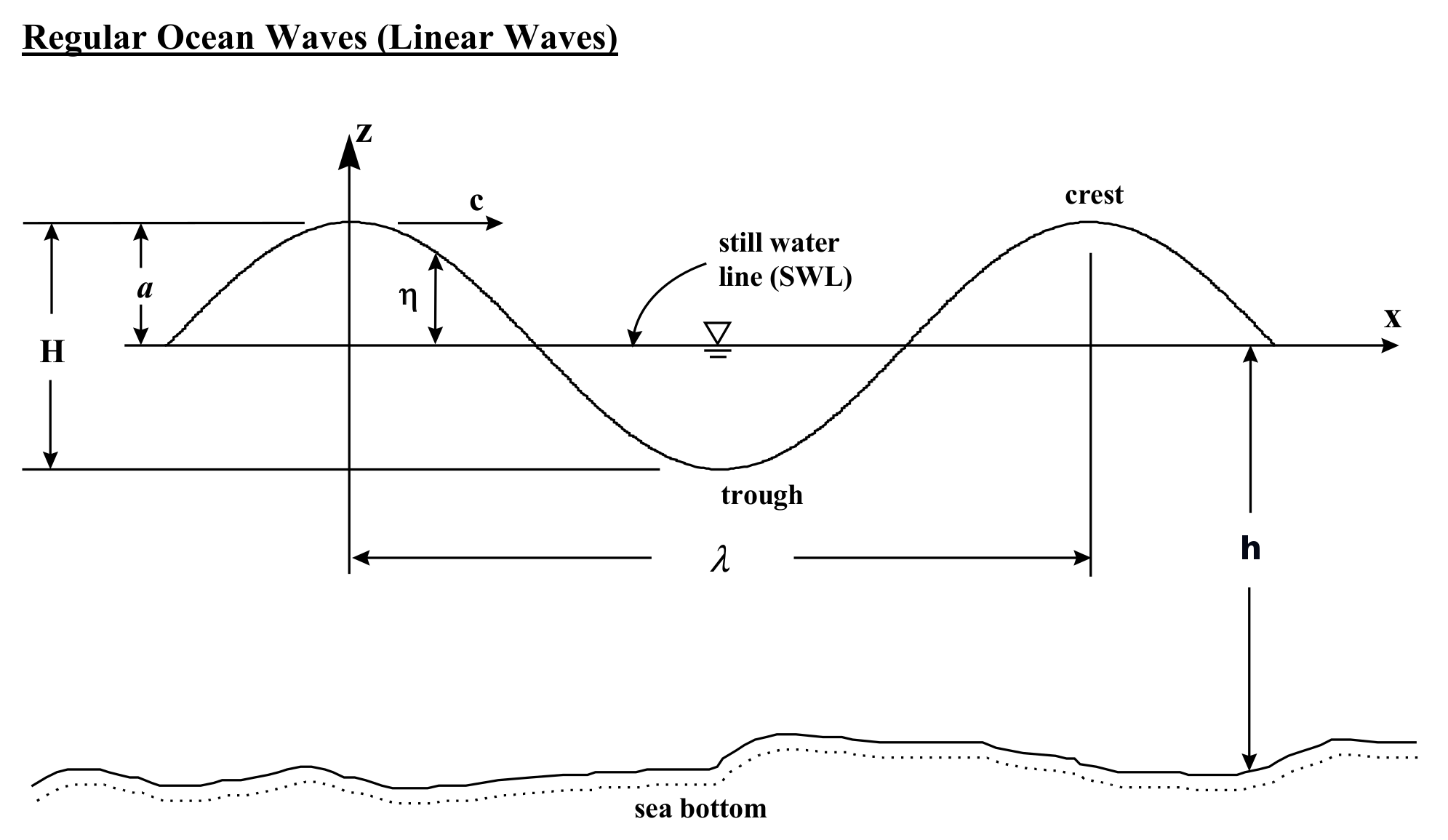 Figure 1. Representation of a regular traveling wave
Figure 1. Representation of a regular traveling wave
- 2039 viste